Ⅰ型

启用自适应巡航时,该指示灯点亮;蓝色圈表示自适应巡航已激活正在工作,灰色圈表示自适应巡航处于待机状态。圆圈里面的数值是自适应巡航的期望车速。详见“驾驶和操控”章节。
Ⅱ型(部分低配车型)

宝骏RC6自适应巡航怎么用【宝骏RC6自适应巡航工作状态指示灯】
激活自适应巡航时,该指示灯点亮。
自适应巡航系统(ACC)*
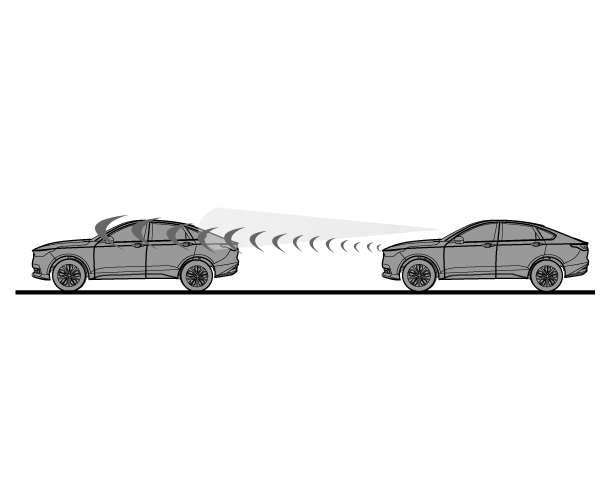
适应巡航可以控制车速与车距。可以在不踩油门踏板的情况下,使车辆保持设定的车速行驶,如果正前方有车辆且车速小于自车车速时,自车可以与前车保持一定的安全距离和行驶状态(前车停止,自车也停;前车起步,自车也起步)。
方向盘上的按键说明
Ⅰ型
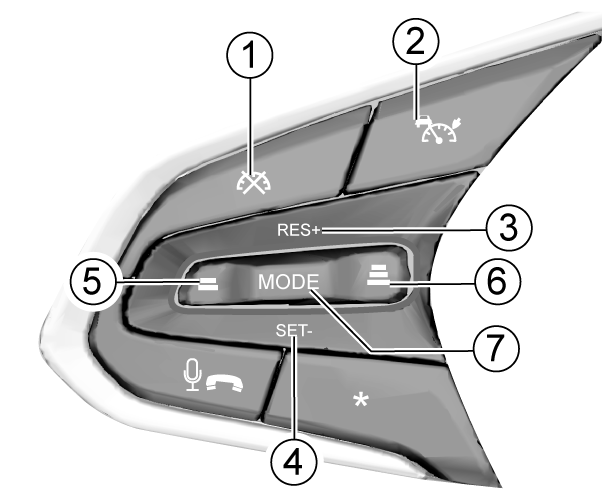
自适应巡航取消
自适应巡航开启/关闭
增加巡航速度(上拨)
激活巡航/降低巡航速度(下拨)
减小时距
增加时距
定速巡航/自适应巡航模式切换(长按)
Ⅱ型
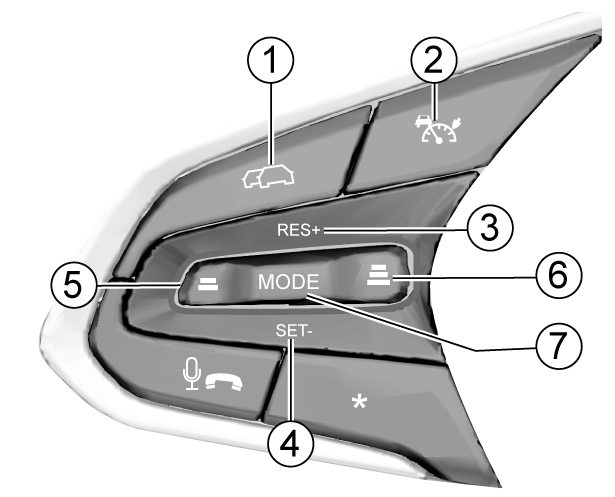
交通拥堵辅助/高速智能领航开启按键
自适应巡航开启/关闭
增加巡航速度(上拨)
激活巡航/降低巡航速度(下拨)
减小时距
增加时距
定速巡航/自适应巡航模式切换(长按)
| 告诫 |
|---|
|
巡航控制系统仅仅是一种舒适性功能,不能代替驾驶员对道路以及交通状况的判断,更不能代替驾驶员驾驶,在任何情况下,驾驶员都应该对车辆安全性负责。 |
| 告诫 |
|---|
|
以下情况驾驶员必须集中精力谨慎驾驶 ●在强烈反射雷达信号的环境下如(多层停车场、隧道等),雷达的性能会大幅降低,请取消或关闭ACC。 ●ACC适合在高速公路或路况良好的道路上使用,在城市道路或山路不推荐使用,上下匝道请勿使用。 ●ACC仅对本车道前方同向行驶的车辆起作用,对迎面、横向、静止或者缓慢移动的车辆不起作用,对行人、动物和道路上的其他物体不起作用。若装备有自动紧急制动系统(AEB),则在一定条件下可以识别静止目标。 ●切勿在天气恶劣(如雾、雨、雪、冰雹、沙尘暴等)、湿滑路面、陡坡或急弯上使用ACC。 ●ACC无法确定本车与指定前方车辆之间的跟车距离是否适当,驾驶员必须保持绝对警惕,随时判断是否可能存在风险。 ●ACC无法防止或避免与前方车辆的碰撞,因此,如果出现任何危险,驾驶员必须立即控制车辆采取适当措施,以确保所有人员的安全。 |
使用方法
一、启用自适应巡航/设定巡航速度
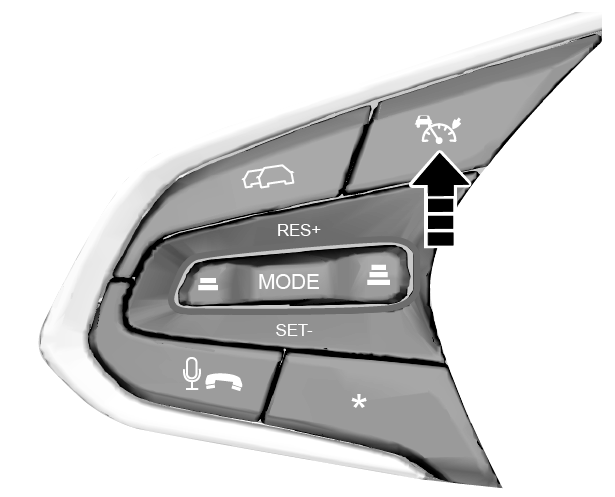

如上图所示,组合仪表上的自适应巡航指示灯显示为灰色,表示自适应巡航进入待机状态。
此时把拨钮(MODE)往“SET-”方向拨动一次,激活自适应巡航。

如上图所示,此时仪表的自适应巡航指示灯显示为蓝色,表示自适应巡航功能已激活,中间的数字为巡航的期望车速。
如果在车速比较低时激活自适应巡航,车辆会自动加速到预设的巡航激活车速。该巡航激活车速可在车机里设置,设置范围30-80km/h。
如果激活自适应巡航时的车速大于预设的巡航激活车速,则以当前车速作为巡航车速。
自适应巡航激活后,如果正前方没有车,则按照设定的车速进行巡航。如果正前方有车且慢于本车,则按照设定的跟车时距进行跟随。
| 注意 |
|---|
|
以下情况将无法激活ACC,仪表会有相应文字提醒,请按文字提醒进行操作即可。 ●车门未关、发动机罩未关 ●驾驶员未系安全带 ●挡位不在前进挡 ●踩着刹车 ●电子手刹未解锁 ●电子稳定控制系统(ESP)未开启 ●速度超过170km/h ●雷达被遮挡 |
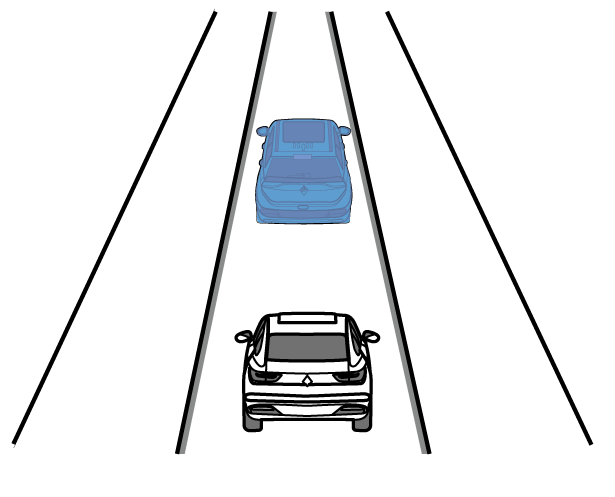
目标车辆识别:当自适应巡航系统识别到前方目标车辆时,该车以蓝色显示。系统将与该车保持设定的跟车时距。
二、暂时退出巡航控制
巡航过程中,存在如下操作,自适应巡航将进入待机模式,此时会存储设定的期望巡航车速。
踩下制动踏板
按下巡航取消按键*(如配有该按钮)
跟车停下超过5分钟
车门未关、发动机罩未关
驾驶员解开安全带
挡位不在前进挡
电子手刹拉起
速度超过170km/h
雷达被遮挡
驾驶员在激活ACC后踩油门踏板超过15分钟
近距离雷达目标丢失
电子手刹、电子稳定控制系统、防抱死系统被激活
车辆后溜
三、恢复巡航控制
暂时退出巡航控制后,可上拨到RES+重新激活巡航控制,此时期望车速是前一次使用巡航控制时设定的目标巡航车速,也可下拨到SET-重新激活,此时以当前车速作为期望车速,如果此时车速低于预设的巡航激活车速,则加速到预设的巡航激活车速。
| 注意 |
|---|
|
拨到“复位+”恢复巡航控制时,原先设定的期望车速可能与当前车速相差较大,可能出现车辆加速过快,请驾驶员谨慎驾驶。 |
四、退出巡航控制
按巡航关闭按钮“]”,此时记忆车速被清除,仪表上自适应巡航控制图标消失。
五、短暂加速功能
在激活巡航控制后,如驾驶员踩下油门踏板加速后,松开油门踏板车辆会缓慢自动恢复到之前设定的巡航速度。
六、提高巡航车速
将拨钮往RES+拨可提高巡航车速,短按速度会增加到最靠近5的倍数值(比如31km/h会增加到35km/h,或35km/h增加到40km/h),长按则按1km/h的变化量持续提高,松开后,车辆会自动加速至设定值。速度设置范围为:30-150km/h。
七、降低巡航车速
将拨钮往SET-拨可降低巡航车速,短按速度会减小到最靠近5的倍数值(比如59km/h会减小到55km/h,或55km/h减小到50km/h),长按则按1km/h的变化量持续降低,松开后,车辆会自动减速至设定值。速度设置范围为:30-150km/h。
八、调整跟车时距
您可以根据需要调整与前车的距离,系统用“跟车时距”来表示。跟车时距是指:以当前车速到达前车位置所需的时间。
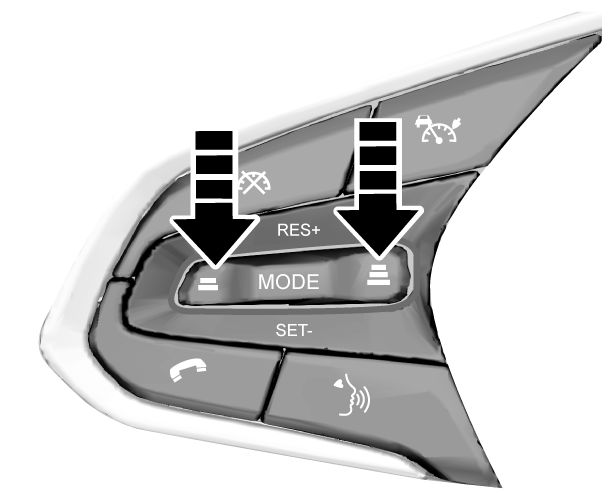
激活ACC后,按压方向盘上“≡”和“〓”分别增加与减小车间时距,一条横线代表一个挡位,时距总共有7挡,7挡时距为2.4s,1挡时距为1秒。跟车时距越短,预留给驾驶员的反应时间越短。请根据前方交通流量、实时天气、道路情况等因素谨慎调整车速和跟车时距,保证安全驾驶。
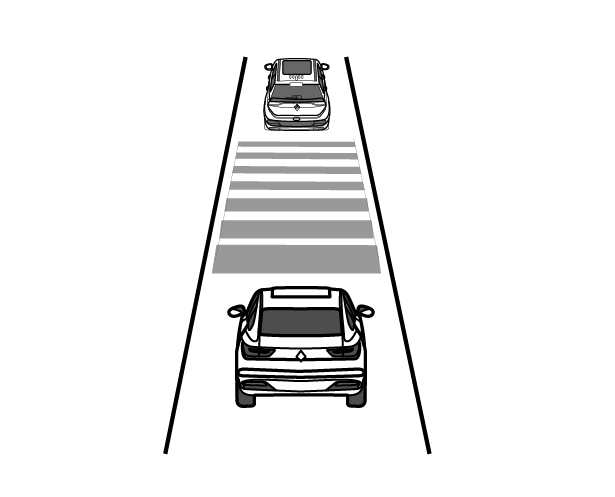
九、ACC停走控制
如果本车跟随前车缓慢停止,ACC会控制车辆在前车后方停下。如果前车在3s内起步,ACC会自动控制车辆跟随前车起步。如果停车时间超过3s,当前车起步时,会在仪表上提示“请轻踩油门恢复跟车”,此时需要驾驶员把拨扭拨向“RES+”或者轻踩油门踏板恢复跟车。
十、ACC接管请求

如果ACC制动不足以与前车保持安全距离,仪表会发出连续警告,同时仪表会文字提示“请接管车辆”,驾驶员必须立即对车辆进行接管,采取相应措施避免发生危险。
十一、ACC与CC的切换
您也可以切换到普通的定速巡航模式,即不跟随前车,只让车辆按一定的速度行驶。
自适应巡航处在待机状态时,长按MODE按钮,组合仪表上定速巡航工作指示灯(5)以灰色点亮,表示定速巡航进入待机状态。当车速达到30Km/h以上的期望车速时,把拨钮往“SET-”拨,定速巡航工作指示灯(5)以绿色点亮,定速巡航功能激活,车辆按当前速度巡航。
功能限制及注意事项
雷达在以下情况可能无法探测到目标车辆或者探测时间较晚,可能出现不期望的加速或者减速或者制动过晚,请驾驶员在以下情况下谨慎驾驶,根据具体情况踩加速踏板或者制动踏板。
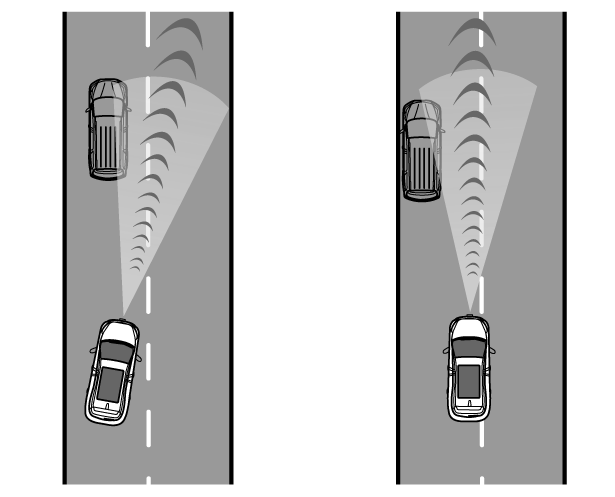
弯道行驶或者车道狭窄时
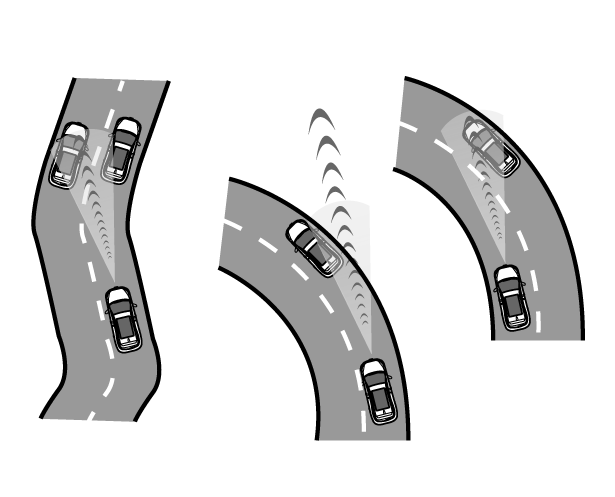
在进入或者驶出弯道时,目标车的选择有可能延迟或受到干扰,这时车辆可能出现不预期的制动或者制动过晚,驾驶员必须保持绝对警惕。
本车在车道中的位置不稳定时
前方装有特殊装载物的车辆
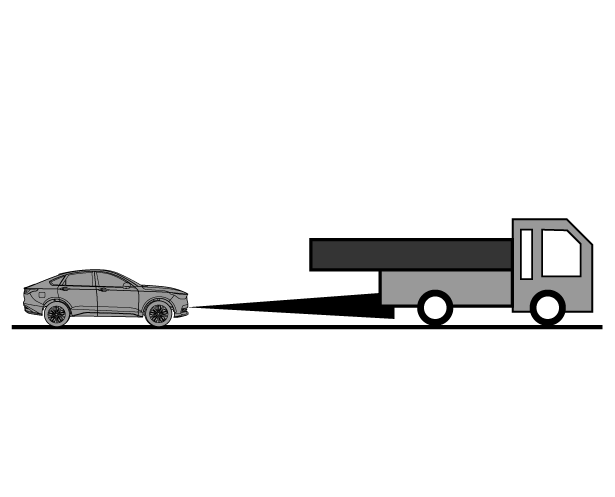
雷达无法探测到前方车辆上装载的超出其车身侧面、后端、车顶的物品或附件。如果前方车辆装有上述特殊物品时,驾驶员应保持警惕,必要时应采取紧急措施并暂时关闭ACC功能。
前方小型车辆、摩托车
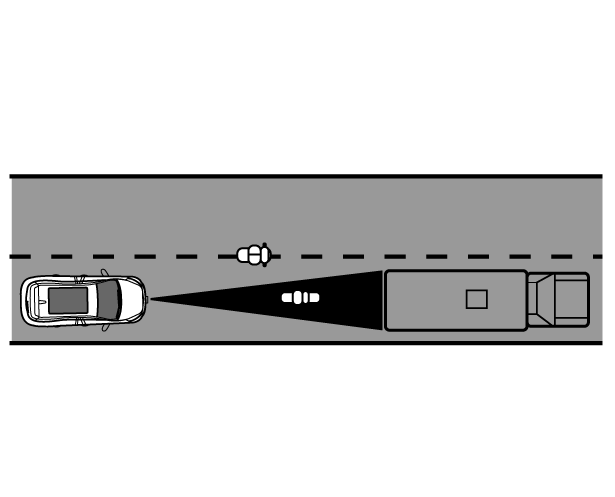
雷达无法探测到摩托车、自行车等狭窄车辆,驾驶员应保持警惕,必须时应采取紧急措施并暂时关闭ACC功能。
前方车辆离地间隙极高
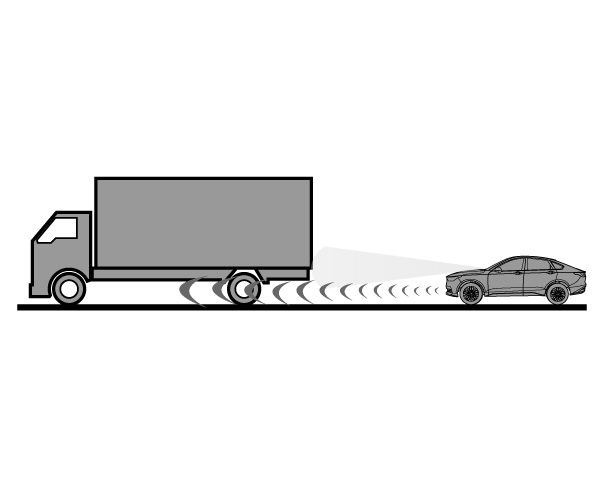
雷达无法探测到前方底盘较高的车辆,驾驶员应保持警惕,必须时应采取紧急措施并暂时关闭ACC功能。
车辆朝上翘起时(由于行李箱负载过重等原因)
由于雷达探测角度变化,导致雷达无法探测到前方车辆,驾驶员应保持警惕,必须时应采取紧急措施并暂时关闭ACC功能。
其他车辆变换车道
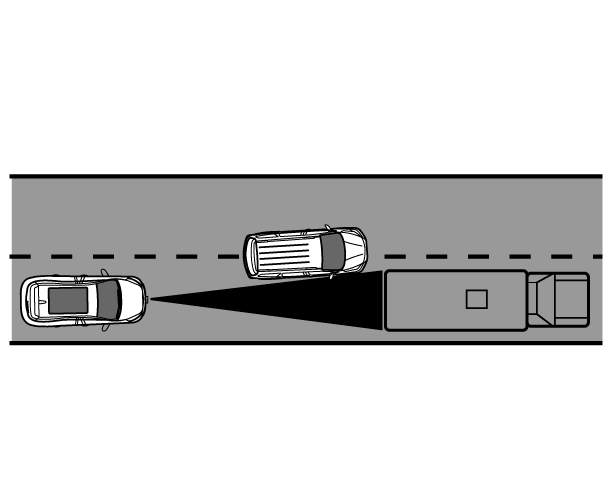
相邻车道的车辆切入本车道时,如未完全进入探测范围,雷达可能无法探测。
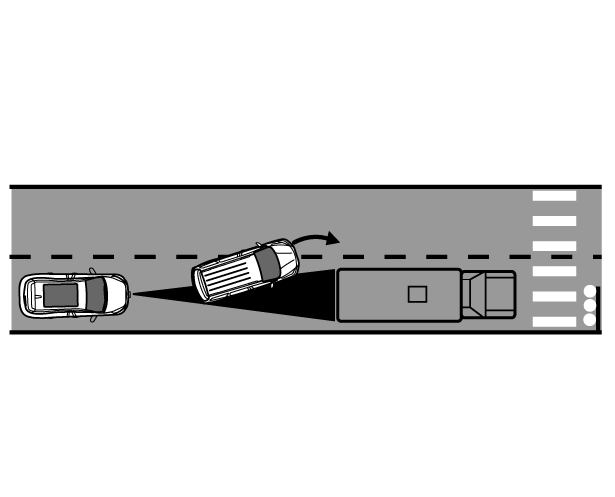
前方车辆突然切出,雷达无法识别前方静止车辆(若装备有AEB系统则在一定条件下可以识别静止目标)。
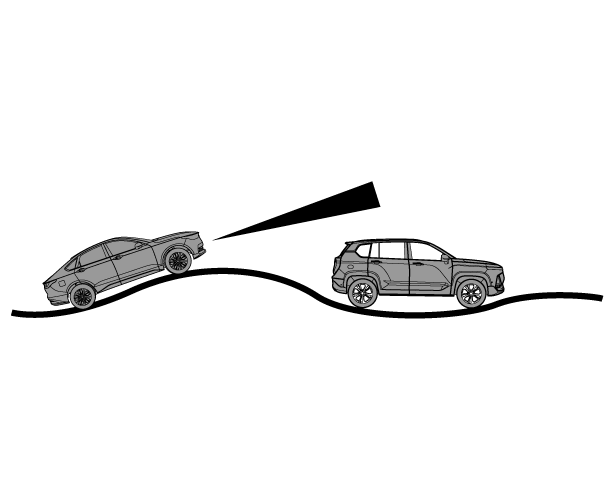
坡道
车辆进入坡道时,雷达可能无法探测到前方车辆。
本车与相邻车道车辆距离过小
在某些情况下,本车可能会对该车辆进行反应并制动。
| 注意 |
|---|
|
为了避免影响雷达的探测性能,请遵守以下注意事项: ●保持雷达(或前徽标)清洁,如有脏污或被水滴、积雪等覆盖,请进行清洁。 ●不要在雷达或前徽标区域安装附件、粘贴贴纸(包括透明贴纸)或其他物品。 ●不要改装或者喷涂雷达或者雷达安装区域。 ●如果需要拆下前格栅或者前保险杠,请联系特约维修服务中心。 ●拆装雷达后需到特约维修服务中心对雷达进行专业校准。 ●如果雷达安装点附近被碰撞,引起雷达故障或者驾驶辅助功能性能下降,请到特约维修服务中心对雷达进行更换或者专业校准。 ●在进行四轮定位中已调节前束或后轮外倾,请到特约维修服务中心对雷达进行专业校准。 |
转载请注明:汽车仪表网 » 宝骏RC6自适应巡航工作状态指示灯





